The robots are controlled by 3 separate subsystems: DRIVE CONTROL, TRACKING, AND COLLISION AVOIDANCE. Each subsystem is controlled by a Basic Stamp micro-controller.
TRACKING
the robots each have a custom designed infrared/sonar system that is used to track the humans in its working radius. The rotating head of this sensor contains a tightly focused passive infrared sensor that triggers a Polaroid ultrasonic ranging device which has a working range of 13 inches to 30 feet. Connected to the rotating head is an absolute positional encoder that resolves 8 angular wedges of the rotation. As the scanner rotates it detects a warm body via I.R. pauses the rotation, and triggers the Polaroid sensor to take a reading, and reads the position encoder. A Basic Stamp computer is used to process range and vector information, and select targets for observation. It then sends the appropriate vector data to the DRIVE CONTROL subsystem.
DRIVE CONTROL
The DRIVE CONTROLLER Stamp computer uses the vector data acquired from the TRACKING sensor to orient the robot such that the video camera is pointed more or less at the selected target. The robot is driven by 2 motorized wheels at the sides with a caster at the front and rear. Speed and direction of the motors are controlled directly from the Stamp via motor bridge driver chips. The robot basically remains in place turning toward detected targets, and will move closer to the selected target on occasion. When moving forward the COLLISION AVOIDANCE system is monitored for nearby objects. When an object is sensed in it's path the robots stops immediately and turns away from the sensed object.
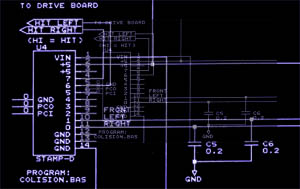
COLLISION AVOIDANCE
Collision avoidance is accomplished with 2 more Polaroid ultrasonic ranging sensors which are mounted under the front of the robot. Facing forward at 40 degrees of center to the left and right, these sensors detect objects in front of the robot as it moves forward. A Basic Stamp reads the distance information from each sensor and determines if it is within a pre-determined range (about 2 feet in front of the robot). A signal is sent to the DRIVE CONTROL if an object is sensed within this range.
In addition, a small infrared LED transmitter and IR receiver is mounted in the center of the front of the robot to detect objects which may be close to the front, yet not seen by the Polaroid sensors. This system operates t 44khz and will detect reflected infrared light within about 9 inches. The DRIVE CONTROLLER responds to this sensor by rotating the robot 180 degrees.